
Introduction
Le moteur pas à pas 28BYJ-48 est un petit moteur électrique capable de convertir des impulsions électriques en mouvement rotatif précis. Il est utilisé dans une grande variété de projets de robotique et d’automatisation, et peut être contrôlé à l’aide d’un pilote ULN2003 et d’une carte Arduino maroc. Dans cet article, nous allons vous montrer comment utiliser ce moteur pas à pas avec ces composants pour créer un mouvement précis.
Matériaux nécessaires
-
 Moteur pas-à-pas avec Driver ULN200345,00 DH
Moteur pas-à-pas avec Driver ULN200345,00 DH -
 Arduino Uno R3 avec câble USB120,00 DH
Arduino Uno R3 avec câble USB120,00 DH


- Un moteur pas à pas 28BYJ-48
- Un pilote ULN2003
- Une carte Arduino, (arduino maroc prix : https://www.moussasoft.com/arduino-maroc)
- Des fils de raccordement
- Une breadboard (plaque d’essai)
- Une alimentation 5V
Connexion du pilote ULN2003 à la carte Arduino
La première étape consiste à connecter le pilote ULN2003 à la carte Arduino maroc. Voici comment procéder :
- Connectez la broche VCC du pilote ULN2003 à la broche 5V de la carte Arduino.
- Connectez la broche GND du pilote ULN2003 à la broche GND de la carte Arduino.
- Connectez la broche IN1 du pilote ULN2003 à la broche 8 de la carte Arduino.
- Connectez la broche IN2 du pilote ULN2003 à la broche 9 de la carte Arduino.
- Connectez la broche IN3 du pilote ULN2003 à la broche 10 de la carte Arduino.
- Connectez la broche IN4 du pilote ULN2003 à la broche 11 de la carte Arduino.
Connexion du moteur pas à pas au pilote ULN2003
La prochaine étape consiste à connecter le moteur pas à pas au pilote ULN2003. Voici comment procéder :
- Connectez la broche 1 du moteur pas à pas à la broche 1 du pilote ULN2003.
- Connectez la broche 2 du moteur pas à pas à la broche 2 du pilote ULN2003.
- Connectez la broche 3 du moteur pas à pas à la broche 3 du pilote ULN2003.
- Connectez la broche 4 du moteur pas à pas à la broche 4 du pilote ULN2003.
Schéma de câblage

câble arduino maroc, arduino agadir, arduino maroc casablanca
Programmation de la carte Arduino
La dernière étape consiste à programmer la carte Arduino pour contrôler le moteur pas à pas via le pilote ULN2003. Voici un exemple de code qui peut être utilisé :
// Déclaration des broches de contrôle du moteur pas à pas
const int in1 = 8;
const int in2 = 9;
const int in3 = 10;
const int in4 = 11;
void setup() {
// Définition des broches de sortie pour les broches de contrôle du moteur pas à pas
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void loop() {
// Séquence de contrôle pour faire tourner le moteur pas à pas dans un sens
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
delay(10);
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
delay(10);
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
delay(10);
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
delay(10);
// Séquence de contrôle pour faire tourner le moteur pas à pas dans l'autre sens
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
delay(10);
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
delay(10);
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
delay(10);
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
delay(10);
}
Le code ci-dessus utilise la librairie de base Arduino pour définir les broches de contrôle du moteur pas à pas et pour envoyer une séquence de signaux pour le faire tourner. La boucle loop() contient deux séquences de signaux, l’une pour faire tourner le moteur dans un sens et l’autre pour le faire tourner dans l’autre sens. Chaque séquence utilise la fonction digitalWrite() pour envoyer des signaux à chaque broche de contrôle du moteur pas à pas, puis utilise la fonction delay() pour faire une pause de 10 millisecondes avant de passer à la prochaine étape de la séquence.
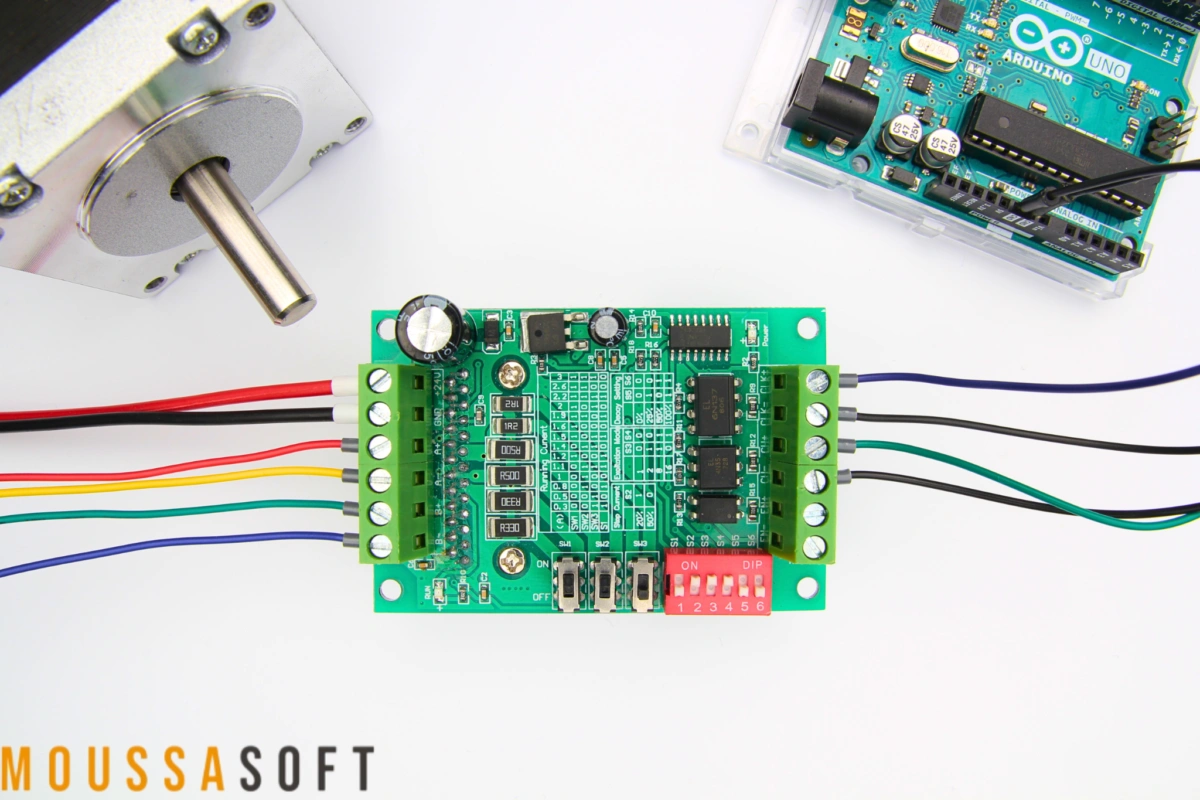
Connexion du pilote ULN2003 au moteur pas à pas 28BYJ-48
Le pilote ULN2003 est un composant électronique qui permet de contrôler le mouvement du moteur pas à pas 28BYJ-48. Il est important de connecter correctement le pilote au moteur pour éviter toute erreur de fonctionnement.
Pour connecter le pilote ULN2003 au moteur pas à pas 28BYJ-48, suivez ces étapes :
- Insérez les fils du moteur dans les bornes du connecteur du pilote ULN2003 en respectant les couleurs : orange dans IN1, rose dans IN2, jaune dans IN3 et bleu dans IN4.
- Connectez les fils d’alimentation du moteur aux bornes correspondantes du pilote ULN2003. Le fil rouge doit être connecté à la borne VCC (+5V) et le fil marron doit être connecté à la borne GND (masse).
- Connectez le fil du signal de commande (fil blanc) du pilote ULN2003 à la broche numérique 8 de votre carte Arduino.
Programmation du moteur pas à pas avec Arduino
Maintenant que tout est connecté, il est temps de programmer votre carte Arduino maroc pour contrôler le mouvement du moteur pas à pas 28BYJ-48. Pour cela, vous aurez besoin de la bibliothèque Stepper.h qui permet de contrôler les moteurs pas à pas.
Voici un exemple de code pour faire tourner le moteur pas à pas 28BYJ-48 dans un sens et dans l’autre :
#include <Stepper.h>
// Définition du nombre de pas par tour du moteur
const int stepsPerRevolution = 2048;
// Définition des broches de commande du pilote ULN2003
const int in1 = 9;
const int in2 = 10;
const int in3 = 11;
const int in4 = 12;
// Création d'un objet Stepper
Stepper motor(stepsPerRevolution, in1, in2, in3, in4);
void setup() {
// Définition de la vitesse de rotation du moteur
motor.setSpeed(100);
}
void loop() {
// Faire tourner le moteur dans un sens pendant une seconde
motor.step(stepsPerRevolution);
delay(1000);
// Faire tourner le moteur dans l'autre sens pendant une seconde
motor.step(-stepsPerRevolution);
delay(1000);
}
Ce code définit le nombre de pas par tour du moteur (2048 pour le 28BYJ-48), les broches de commande du pilote ULN2003 (in1, in2, in3, in4) et crée un objet Stepper. Dans la fonction setup, la vitesse de rotation du moteur est définie à 100 pas par seconde. Dans la fonction loop, le moteur est fait tourner dans un sens pendant une seconde, puis dans l’autre sens pendant une seconde.
Vous pouvez modifier la vitesse de rotation du moteur en modifiant la valeur passée à la fonction setSpeed(). Vous pouvez également modifier le nombre de pas effectués par le moteur en modifiant la valeur passée à la fonction step().
Testez le moteur pas à pas
Après avoir terminé la programmation, il est temps de tester le moteur pas à pas. Assurez-vous que le circuit est correctement connecté à l’Arduino et que le programme est téléversé sur la carte.
Lorsque vous téléversez le programme, le moteur devrait commencer à tourner dans un sens pendant une seconde, puis dans l’autre sens pendant une seconde, à une vitesse de 100 pas par seconde. Si le moteur ne fonctionne pas correctement, vérifiez les connexions et assurez-vous que vous avez correctement téléversé le programme.
Vous pouvez également modifier le code pour faire tourner le moteur dans différentes directions ou à des vitesses différentes. Une fois que vous avez testé le moteur et que vous êtes satisfait de son fonctionnement, vous pouvez l’utiliser pour votre projet.
Conclusion
En conclusion, le moteur pas à pas 28BYJ-48 est un excellent choix pour les projets nécessitant un contrôle de position précis et une rotation à vitesse constante. Le pilote ULN2003 permet de contrôler facilement ce moteur avec une carte Arduino maroc, en fournissant un courant suffisant pour faire fonctionner le moteur correctement.
Nous espérons que ce tutoriel vous a été utile pour comprendre comment utiliser le moteur pas à pas 28BYJ-48 avec le pilote ULN2003 et une carte Arduino. Si vous avez des questions ou des commentaires, n’hésitez pas à les partager dans la section des commentaires ci-dessous.
Nous vous encourageons également à explorer davantage les possibilités de ce moteur pas à pas en l’utilisant dans vos propres projets et expérimentations. Avec un peu de créativité et d’imagination, les possibilités sont infinies !
Références
[1] Moteur pas à pas 28BYJ-48 datasheet: https://www.datasheet-pdf.fr/pdf-file/1078468/ETC1/28BYJ-48.pdf
[2] Pilote ULN2003 datasheet: https://www.sparkfun.com/datasheets/Components/General/ULN2003.pdf
[5] Article sur les moteurs pas à pas: https://fr.wikipedia.org/wiki/Moteur_pas_%C3%A0_pas
[6] Article sur les pilotes de moteur: https://fr.wikipedia.org/wiki/Pilote_de_moteur
[7] Site officiel Arduino: https://www.arduino.cc/
[8] Site officiel du fabricant du moteur pas à pas 28BYJ-48: https://www.kuman.io/produits/kuman-5-x-28byj-48-ultime-moteur-pas-a-pas-avec-le-module-uln2003-pour-arduino-5v-4-phase-stepper-motor-uln2003-driver-board-fp03-5x
[9] Site officiel du fabricant du pilote ULN2003: https://www.ti.com/product/ULN2003A