






-
 Récupération au magasin Moussasoft
Récupération au magasin Moussasoft
-
Livraison partout au Maroc
-
Livraison à Agadir
328,00 DH
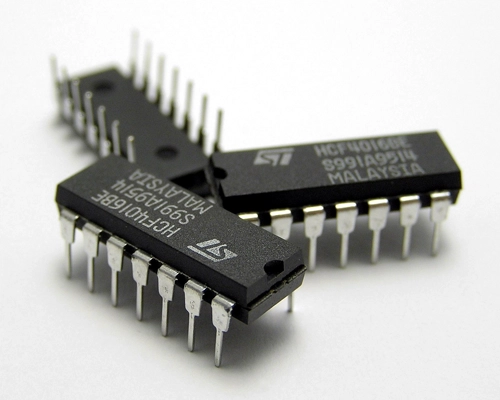
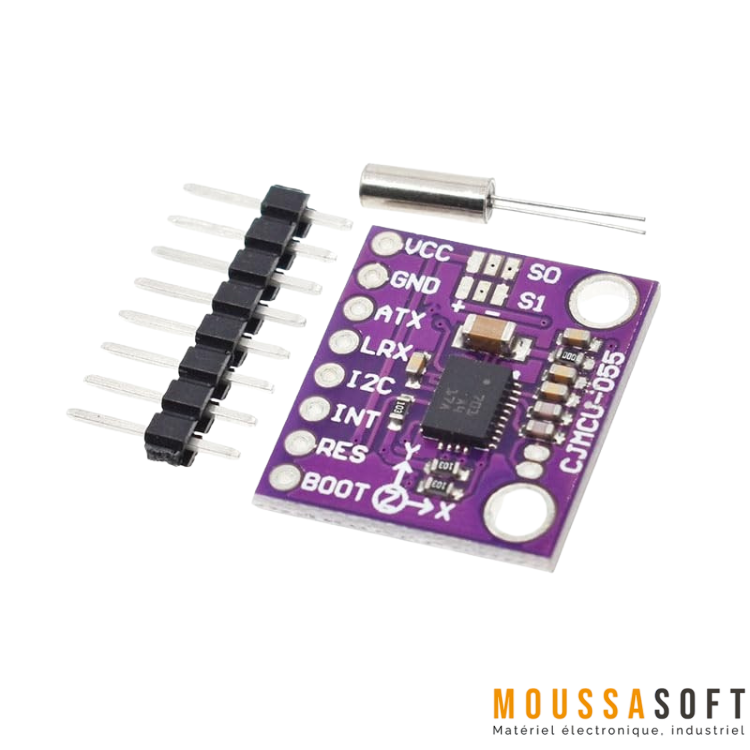
BNO055 : capteur d’orientation 9 axes avec fusion de capteurs intégrée (MCU interne), idéal pour robotique, stabilisation, navigation et mesures d’attitude. Il fournit directement Euler ou quaternion (orientation absolue), ainsi que accélération, vitesse angulaire, champ magnétique, gravité, etc. Communication I2C (par défaut) et sélection d’adresse 0x28 / 0x29 (selon le module).
7 en stock
Le BNO055 est un capteur “tout-en-un” (SiP) qui regroupe un accéléromètre triaxial, un gyroscope triaxial et un magnétomètre triaxial, ainsi qu’un microcontrôleur interne exécutant la fusion de capteurs Bosch. L’avantage est simple : vous obtenez une orientation stable (Euler ou quaternion) sans avoir à coder vous-même des filtres complexes (Kalman/Madgwick/Mahony).


1 en stock

79 en stock


Pas encore de compte ?
Créer mon compte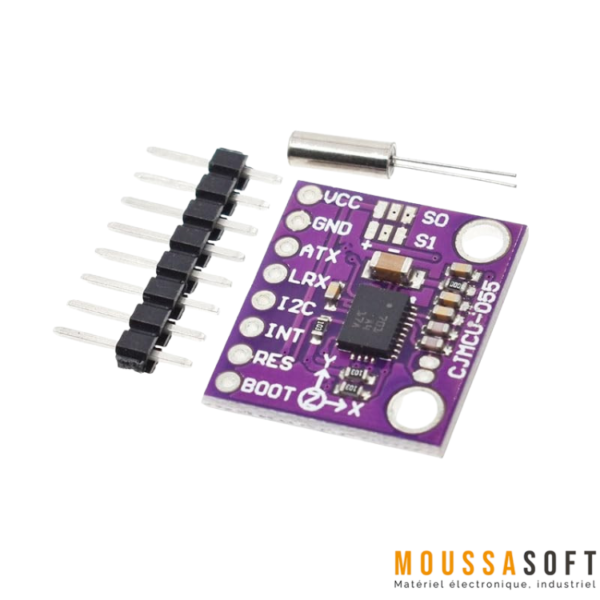
7 en stock