

-
 Récupération au magasin Moussasoft
Récupération au magasin Moussasoft
-
Livraison partout au Maroc
-
Livraison à Agadir




220,00 DH
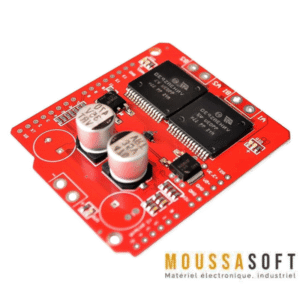
L298P Moteur Driver Shield permet de piloter des moteurs à courant continu (DC) ou des moteurs pas à pas en contrôlant leur vitesse et leur direction.
Il peut être alimenté par une alimentation externe (de 5V à 12V) ou par la carte Arduino elle-même.
Le module dispose également de fonctionnalités telles que la détection de courant, l’arrêt et le freinage en fonctionnement libre.
Disponible sur commande
L298P Moteur Driver Shield est un module basé sur le circuit intégré L298, permettant de piloter deux moteurs à courant continu ou un moteur pas à pas.
La vitesse et la direction de chaque moteur peuvent être contrôlées indépendamment, et le shield offre une large gamme de connexions pour les broches numériques et analogiques d’Arduino.
Il est conçu pour simplifier et optimiser le contrôle des moteurs dans divers projets basés sur Arduino, offrant une grande flexibilité grâce à sa compatibilité avec les broches analogiques et numériques d’Arduino et à sa facilité d’utilisation.
Le module fonctionne avec une tension d’entrée de 5V et peut fournir un courant maximum de 2A par canal ou 4A au total.
Le contrôleur de moteur L298P permet le contrôle bidirectionnel des moteurs à balais CC et le pilotage d’un moteur pas à pas.
Le shield dispose également d’une détection de courant de 1.65V / A, d’un buzzer intégré pour les alarmes de marche arrière et d’un indicateur pour le changement de direction.
La fiche technique : https://www.mantech.co.za/Datasheets/Products/EX029.pdf
Il offre une variété de connexions pour faciliter l’intégration avec d’autres composants électroniques.
Les interfaces numériques et analogiques (D2, D3, D5, D6, D7, D9, A0, A1, A2, A3, A4 et A5) permettent de connecter facilement des capteurs et des modules complémentaires.
Ces fonctionnalités offrent une multitude de possibilités pour personnaliser et étendre les capacités des projets basés sur Arduino.
Le fonctionnement du L298P Motor Driver Shield est simple. Les utilisateurs peuvent contrôler la vitesse et la direction des moteurs en modifiant les signaux de commande PWM et les signaux d’activation (ENA et ENB).
La vitesse des moteurs est contrôlée en faisant varier les valeurs de cycle de service PWM, tandis que la direction est déterminée par les niveaux logiques des signaux d’activation.
Le shield offre également la possibilité de mesurer le courant traversant les moteurs, permettant ainsi un contrôle précis et en temps réel du fonctionnement des moteurs.




Pas encore de compte ?
Créer un compte
Disponible sur commande