










-
 Récupération au magasin Moussasoft
Récupération au magasin Moussasoft
-
 Livraison partout au Maroc
Livraison partout au Maroc
-
 Livraison à Agadir
Livraison à Agadir
180,00 DH
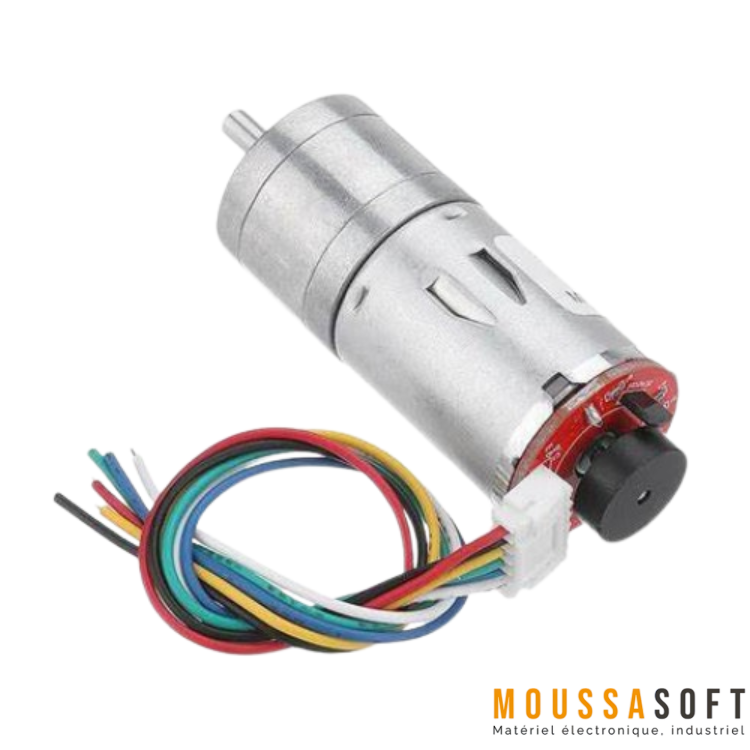
25GA-370 12V 130RPM : motoréducteur DC compact avec encodeur intégré pour mesurer la vitesse/position. Idéal pour robotique, convoyeurs, mécanismes automatiques et projets nécessitant un contrôle précis (PID, asservissement). Couple élevé grâce au réducteur, alimentation 12V.
2 en stock
Le 25GA-370 est un moteur DC équipé d’un réducteur métallique (diamètre ~25 mm) et d’un encodeur monté à l’arrière. Le réducteur augmente le couple et stabilise la vitesse, tandis que l’encodeur fournit un signal de retour (impulsions) pour mesurer la vitesse, la distance parcourue ou la position. C’est la combinaison parfaite pour les projets où vous voulez passer d’un simple moteur “ON/OFF” à un moteur asservi.
| Type | Moteur DC + réducteur (motoréducteur) + encodeur |
|---|---|
| Modèle | 25GA-370 |
| Tension nominale | 12V DC |
| Vitesse | 130 RPM (indicatif à 12V) |
| Encodeur | Encodeur incrémental (sorties impulsions, souvent A/B selon version) |
| Usage | Contrôle vitesse/position, robotique, automation |





Pas encore de compte ?
Créer mon compte
2 en stock